
之前介绍的新能源汽车电机控制器(MCU)和电动助力转向(EPS)文章中,有提到电机的角度反馈可选择转旋转变压器方案,今天做个分享,欢迎留言交流
本文目录:
-
旋转变压器应用及参数概览
-
旋转变压器原理
-
旋转变压器配套芯片
-
旋转变压器解码算法
-
旋转变压器的厂家及选型
旋转变压器(Resolver/Transformer)是一种电磁式传感器,用于测量旋转物体的转轴角位移和角速度,由定子和转子组成,因为结构简单、动作灵敏、工作可靠、对环境条件要求低(特别是高温、高粉尘的地方)、输出信号幅度大和抗干扰能力强等优点,广泛应用在伺服控制系统、机器人系统、汽车等领域;(缺点就是信号处理复杂)
如下是德国莱特纳LTN旋转变压器RE-21的参数,旋转变压器的测量精度用角秒衡量,一度=60角分,1角分=60角秒(角秒符号 ‘)

如下是旋变在电机安装的实际照片
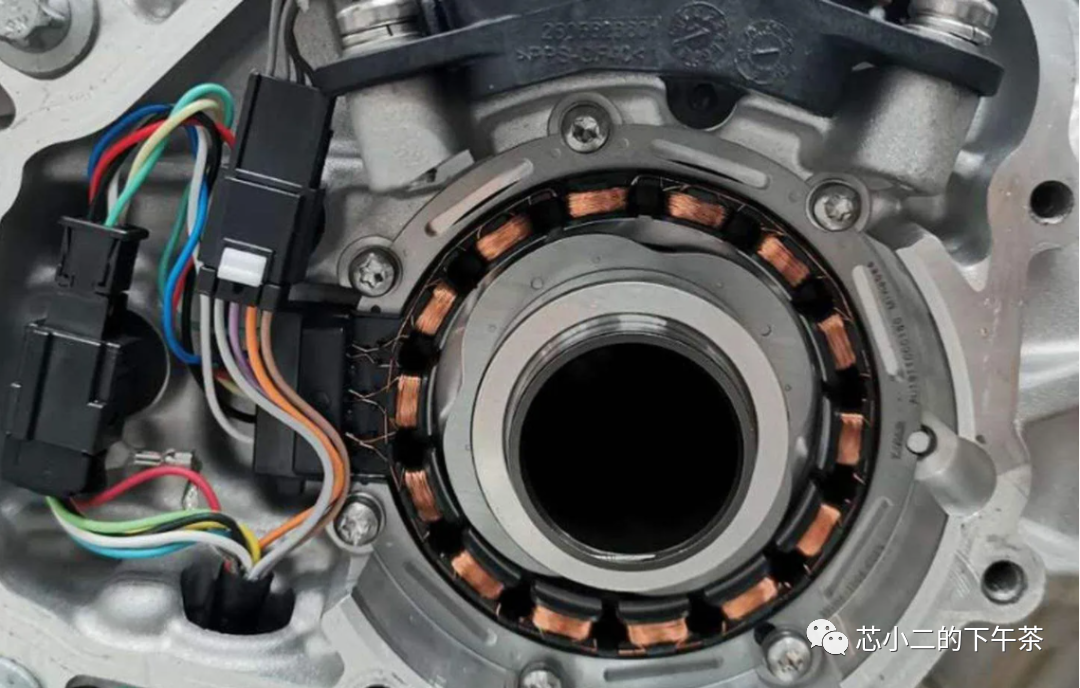 图片摘自 RIO电驱动
图片摘自 RIO电驱动
旋转变压器以可变磁阻式旋转变压器应用最为广泛,由转子和定子铁芯组成,如下图所示:中间的转子由层压磁性钢板组成,定子铁芯上有单相励磁线圈绕组(R1− R2)和两相输出线圈绕组(S1− S3, S2 − S4),两对输出绕组隔90°摆放
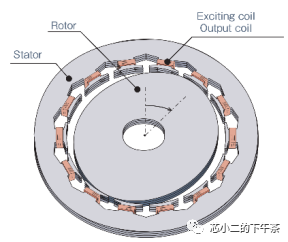
当励磁线圈由交流电压激励时,根据变压器原理,输出绕组上有相应交流电压;
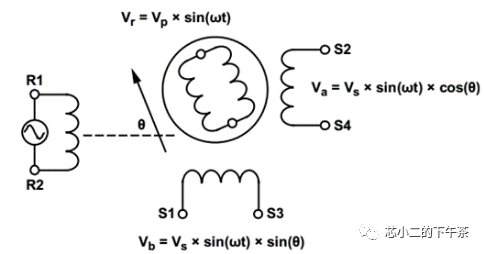
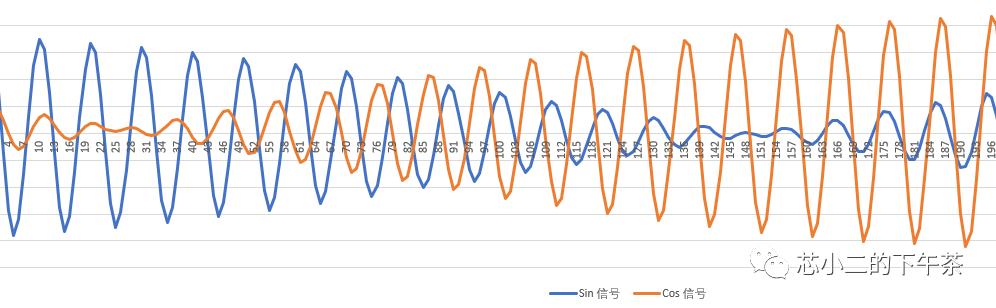
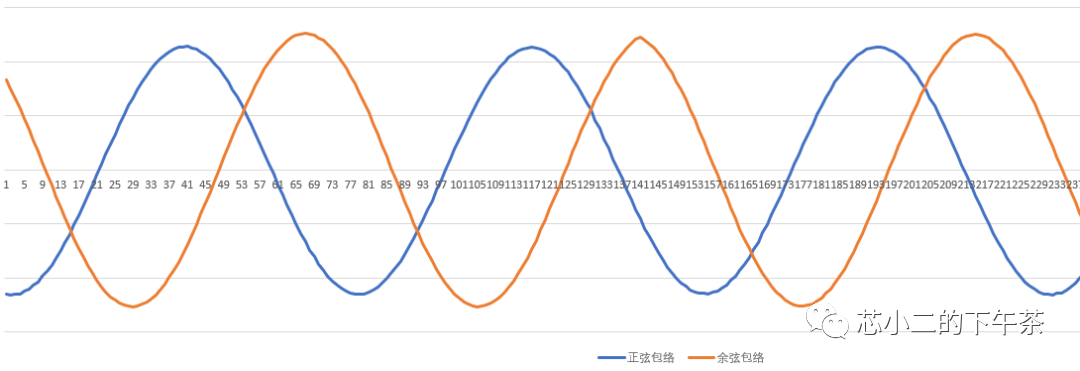
旋转变压器内定子与转子气隙特别设计,使得其磁导率随旋转角变化符合正弦分布,当转子旋转时,两相输出线圈绕组的输出电压也随转子变化(输出的包络线形状和磁导率成比例)
理想的输入及绕组输出波形如下
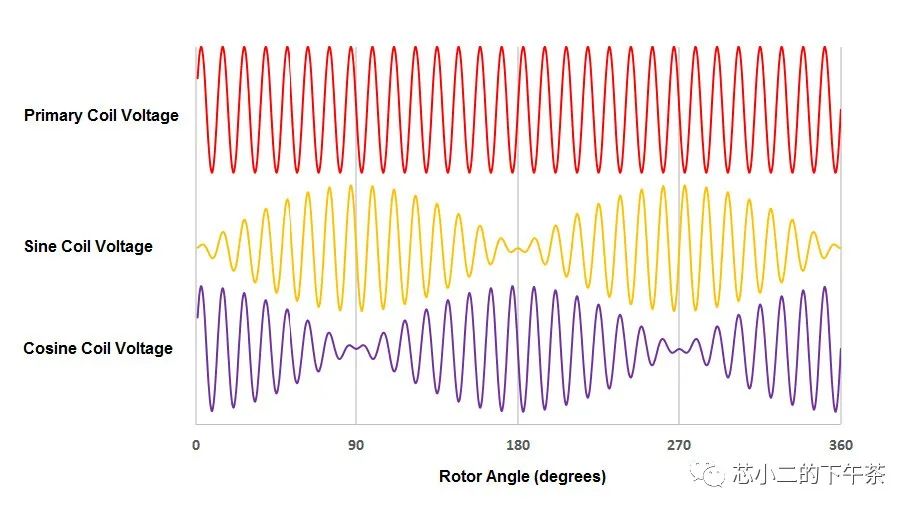
图片转自 鼎阳硬件智库
基于上文介绍,可以知道,一方面需要给旋变提供激励,一方面需要基于旋变的输出进行计算;
方案一:
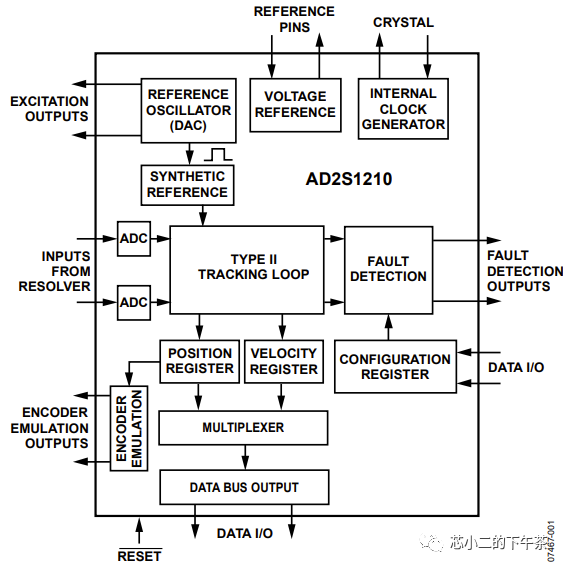
采用专用的旋变芯片,比如ADI的AD2S1210,MCU通过总线进行配置&读取结果;
-
-
-
-
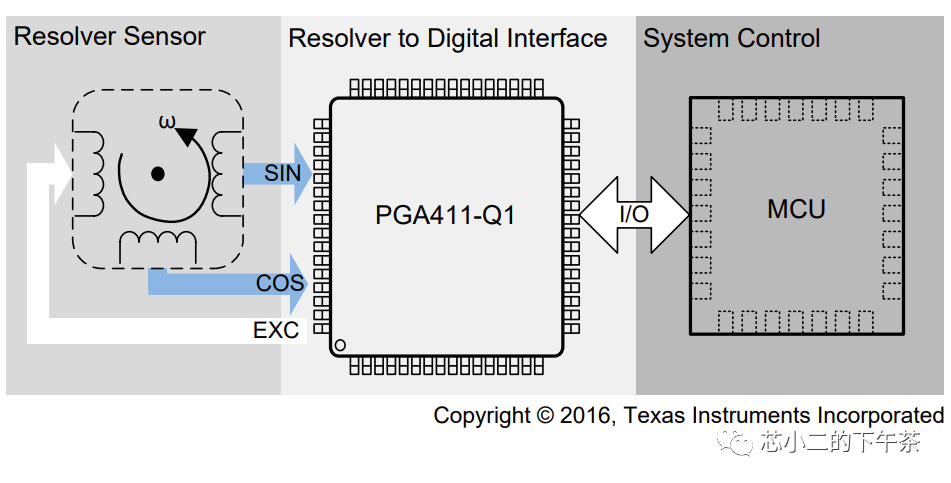
德州仪器的PGA411也是类似
方案二:
采用AD2S1210方案成本太贵了,好几个美金,于是具有研发实力的企业,开始尝试基于MCU的软解码方案
如下图,是STM32基于SPC58NN推出的软解码方案
说明:SPC58NN是200MHz主频,3x e200z4 CPU,支持浮点运算加速、6Mbyte Flash、支持GTM344、6组独立的16bit Sigma-Delta ADC模块和最高12bit多通道SAR ADC、ASIL-D安全等级等特性
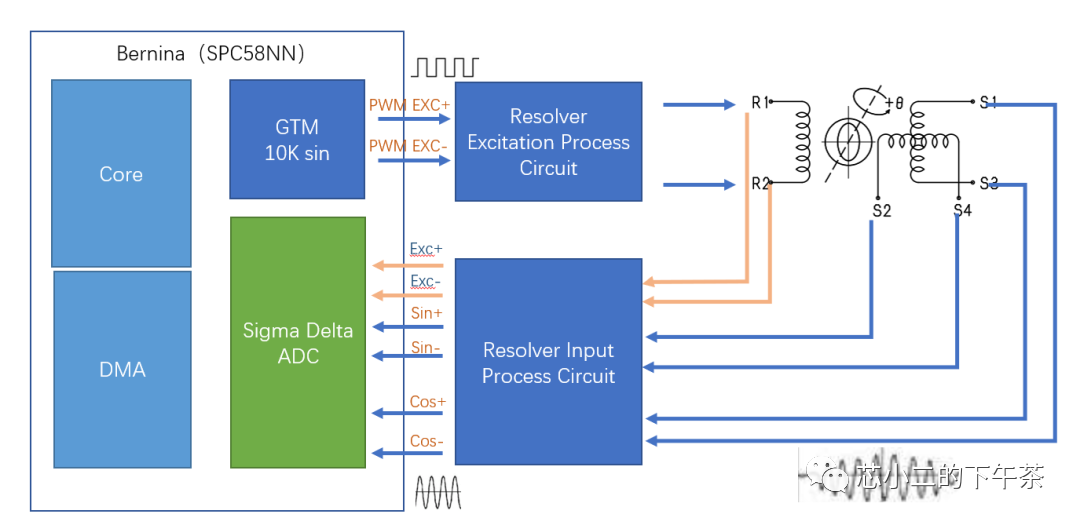
在激励信号生成部分,基于SPC58NN的GTM344模块提供旋变器激励(Excitation)信号,使用基于GTM中的PSM,AFE,FIFO,F2A等功能,结合ATOM,进行PWM调制的数字信号输出,经过信号调理电路,输出一定幅度和10KHz频率的正弦波激励信号。
在信号采集部分,针对激励信号回采及正弦和余弦信号,使用3组差分Sigma-Delta ADC进行采样测量,经过SPC58NN处理,实现模拟信号的预处理、正弦和余弦包络计算及最终角度和速度的解码。
瑞萨电子基于RH850,德州仪器基于TMS320F2837X实现了类似的软解码方案
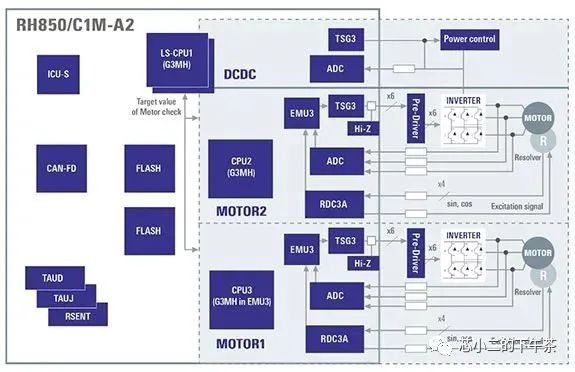
图片转自 可可电驱
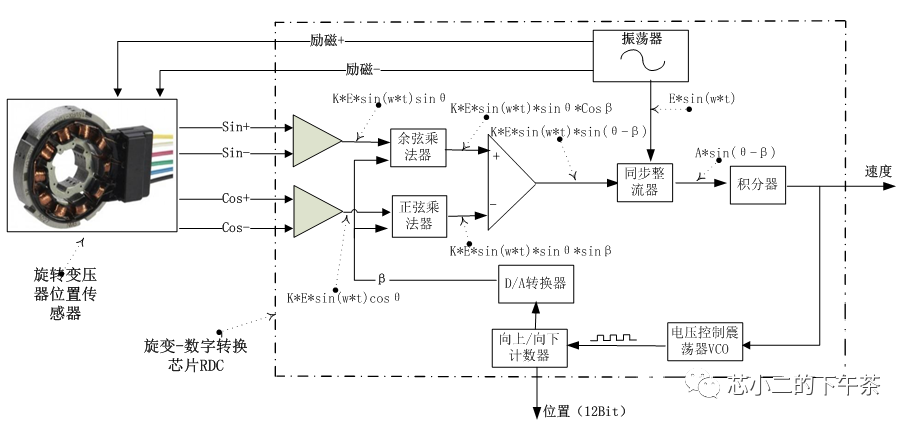
产生励磁电压(约8kHZ,10Vrms)供电给旋转变压器,采集旋转变压器输出的正、余弦信号,正余弦分别经过余弦乘法器和正弦乘法器后连接到减法器的正负端,减法器输出电压 △V为:
△V=K* E*sin(ω*t)*sinθ*cosβ- K* E*sin(ω*t)*cosθ*sinβ
△V=K* E*sin(ω*t)*sin(θ-β)
△V再进入同步整流器与励磁信号进行解调,去除载波频率ω,所得差值电压信号与sin(θ-β)成正比例,即:
△V’再进入积分器,当θ与β角度存在差值,积分器将输出一个DC电压,该电压控制振荡器VCO而产生脉冲信号进行向上/向下计数。
由正/余弦乘法器、同步整流器、积分器、电压控制振荡器、计算器和D/A转换器形成了闭环控制系统,类似于锁相环PPL。当θ与β角度的差值为0时,则计数器的数字值对应于旋转变压器位置传感器输出的角度模拟量,就此RDC芯片解码完成。
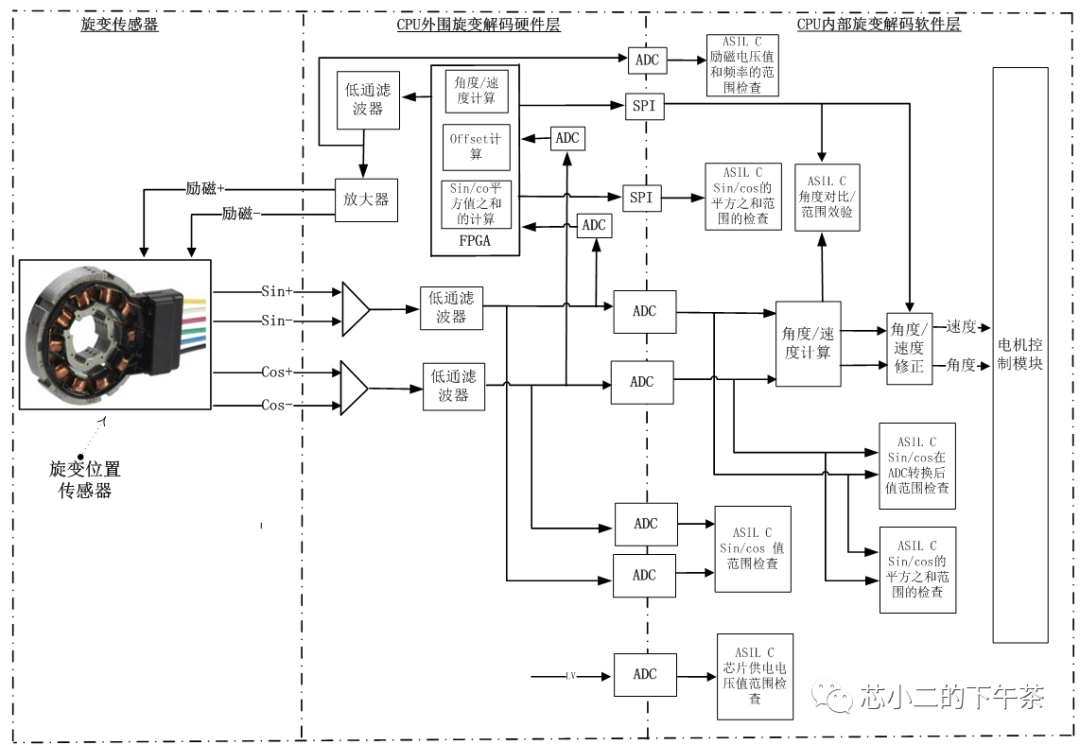 图片转自 可可电驱
图片转自 可可电驱
更多信息,可关注可可电驱,有不少好历史文章,作者已2年多未更新
世界上生产旋变的供应商很多,如德国莱特纳LTN(LITTON)、德国西门子SIEMENS、日本多摩川TAMAGAWA、捷克阿塔斯ATAS、美国泰科TYCO(TE)、美国哈罗威HAROWE等
国内也有不少旋转变压器供应商,如常州华旋,上海赢双,长友自动化等
在进行旋转变压器选型时候,除了关注旋转角精度,速度范围外,还需要注意: