无论是AR眼镜和手机领域,sensor都在其中被大量使用。思考了很久,还是决定陆续写一些传感器相关的文章,主要包括基础知识扫盲、测试内容和规范、调试经验等。受限于本人的技术积累,仅供大家参考。01 什么是ToF传感器ToF:Time of flight(飞行时间),通过测量超声波或光等信号在发射器和接收器之间的“飞行时间”,来计算和被测物体之间的距离,本质上是一种测距的方法。利用ToF原理实现测距功能的传感器,则被称为ToF传感器。常用的ToF传感器有超声波、红外和激光这三种。以光学ToF为例,传感器通过微发射器发射激光或红外,光在目标物体表面被反射,并被接收器接受。通过计算发射光到接受光之间的精确时间,就可以计算出ToF传感器到目标物体的距离:(光速*飞行时间)/2。实际中的ToF传感器是一个阵列,并不发射和接收单一点的光源。通过阵列,可以测量目标物体整个表面到传感器的距离,这样就能获得目标对象的深度信息。再结合相机,就可以获得3D图像,达到和结构光、双目CAM方案一样的立体视觉效果。被广泛应用于手机、XR、机器人、汽车等领域的运动检测、用户特征识别、SLAM算法等。02 ToF的分类1)dTOF即direct Time of flight(直接测量飞行时间),dToF采用光脉冲调制方式,通过向被测目标发射光脉冲,并检测发射和发射光脉冲的时间间隔,直接计算待测目标的距离(即深度信息)。dToF的核心构成包括垂直腔面发射激光器(VCSEL)、单光子雪崩二极管(SPAD)、时间数字转换器(TDC)。dToF传感器通过VCSEL发射脉冲波,SPAD接收从目标物体反射回来的光脉冲,TDC则可以记录每次发射和接收脉冲之间的时间间隔。由于SPAD捕获一段脉冲内哪一个瞬间到达的光子有一定随机性。这种随机性的概率与光脉冲在这个瞬间的能量近似正比。因此,dToF会在单帧测量时间内发射和接收N次光信号,TDC通过记录生成一个关于飞行时间的分布直方图,其中出现频率最高的飞行时间,则作为目标测量值t,距离D=c*t/2。
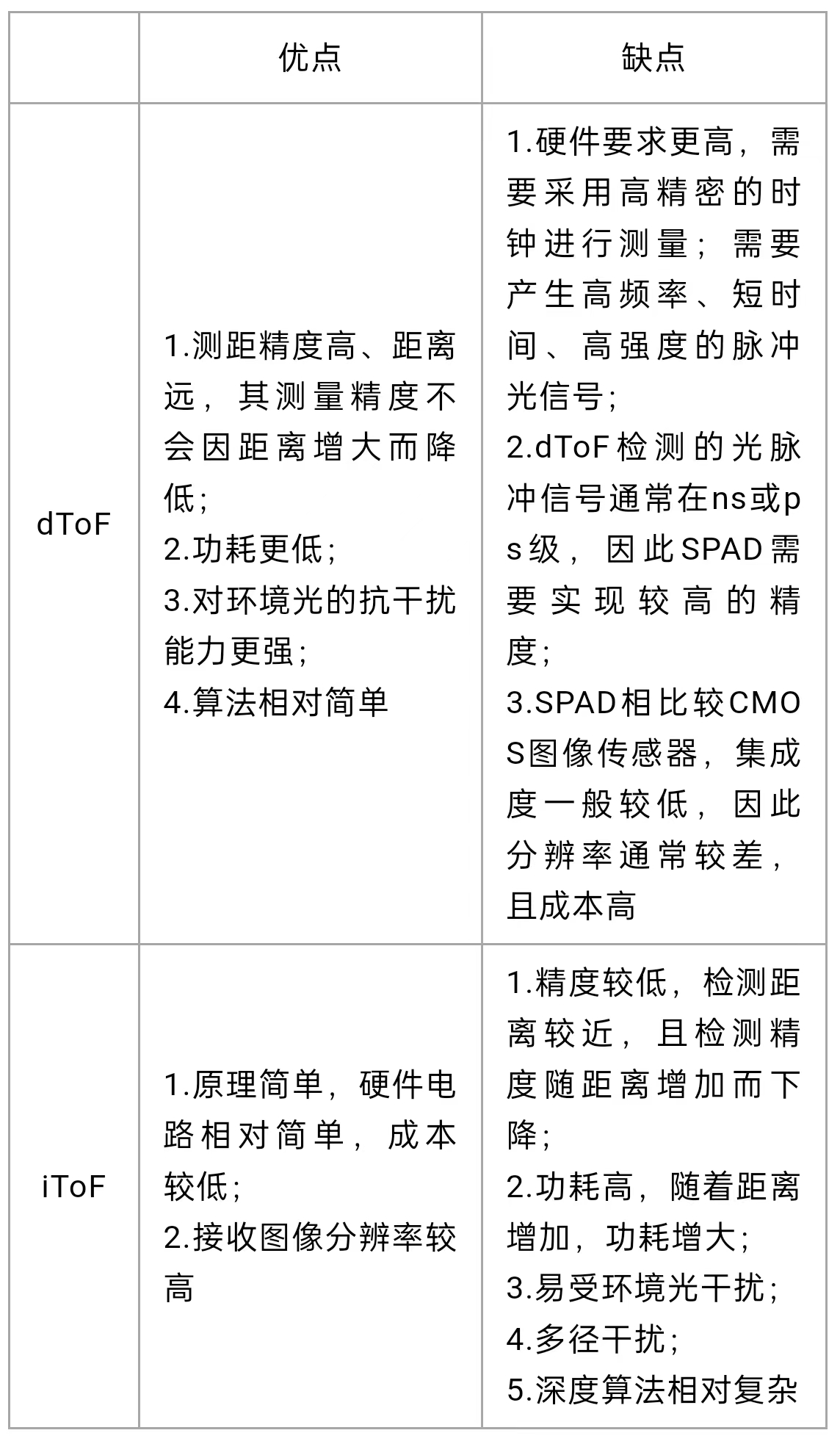
2)iToF即indirect Time of flight(间接测量飞行时间),iToF采用连续波调制方式,将发射光调制成某一频率的周期信号,通过测量发射信号和接收信号的相位差,来间接测量光的飞行时间。iToF的核心构成包括垂直腔面发射激光器(VCSEL)、图像传感器。VCSEL发射特定频率的周期调制光信号,图像传感器在曝光(积分)时间内接收发射光并进行光电转换,曝光(积分)结束后,将数据传给计算单元,最终计算每个像素的相位偏移。iToF通常4个相位延迟分别为0°、90°、180°、270°的采样窗口计算深度,最终可以得到相位偏移的计算公式为φ=(Q3-Q4)/(Q1-Q2),在计算深度信息d=(φ/2πf)*c/2。其中分别计算Q1~Q4,是为了减小恒定偏移量对测量的影响,相位方程中的商减小了测量过程中的常数增益的影响,比如系统放大、衰减等。3)dToF和iToF对比03 ToF相机ToF相机就是由ToF传感器和图像传感器共同组成的一种3D深度相机,是一种主动光探测相机,即自身发射光信号,并检测发射回来的光信号。ToF相机通常包含如下几个部分:发射单元、光学透镜、成像单元、控制单元和计算单元。通过这些部件,ToF相机的每个像素都对应一个目标物体的深度信息,这个像素共同组成了一个深度图像。例如下图这种,使用不同的灰度值来代表不同的深度信息。