深入理解激光雷达(LiDAR)技术
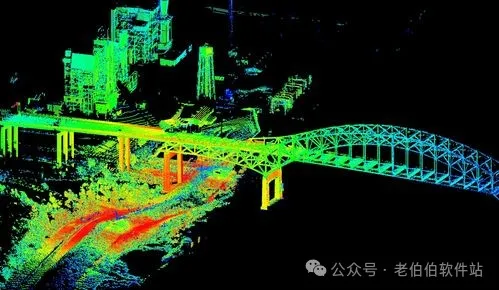
激光雷达(Light Detection and Ranging),简称LiDAR,是一种重要的遥感技术,主要依靠发射激光脉冲并测量反射回来的光的时间来计算距离。近年来,随着自动驾驶技术的发展,LiDAR逐渐成为人们关注的焦点。本文将详细解释激光雷达技术及其在自动驾驶中的应用,帮助理解这一前沿的检测技术。
激光雷达技术原理
LiDAR技术的基本原理是使用激光测距,通过发射激光脉冲并接收反射信号,测量脉冲往返时间(time-of-flight, TOF)。由于光速是已知的,通过计算可以精确得到激光与目标物体之间的距离。具体的计算方式如下:distance = (speed of light × time of flight) / 2
上述公式中,光速约等于299,792,458米/秒,时间是激光从发射到接收的往返时间,因为光需要走两次路程,所以结果要除以2。
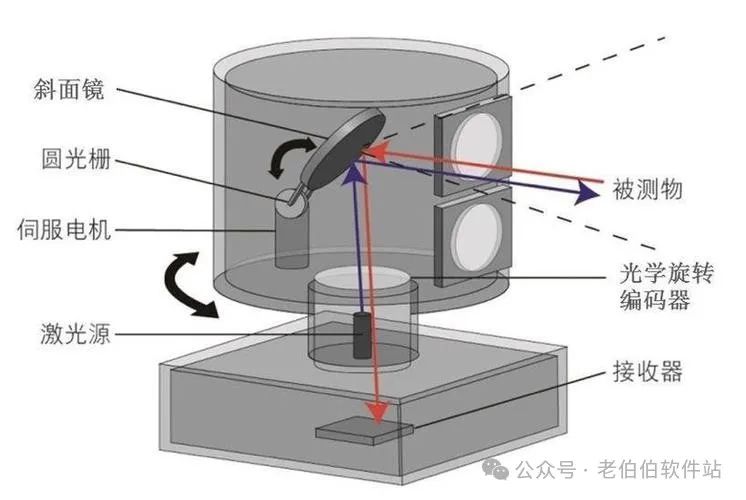
激光雷达的关键组件
激光雷达系统由以下几个核心部分组成:
-
1. 发射器:通常使用半导体激光器发射脉冲光。
-
2. 扫描和光学系统:用以改变激光的方向,对场景进行扫描。
-
3. 探测器和接收器:接收反射回来的激光信号,并将光信号转换成电信号。
-
4. 位置和导航系统:包括GPS和惯性测量单元(IMU),用于确定激光雷达的精确位置和方向。
每个组件都有多种实现方式,这些方式会影响到激光雷达的性能指标,例如测量的距离、精度、分辨率和工作速度。
激光雷达技术的类型
根据不同方面,激光雷达可以分为多种类型。按照工作方式主要分为以下几类:
-
1. 脉冲式激光雷达:通过测量单个脉冲的往返时间来得到距离信息。
-
2. 相位式激光雷达:通过比较发射的激光与反射回来激光波形的相位差来计算距离。
按照使用的波长,可以分为近红外、绿色激光雷达等不同种类。此外,还可以根据使用场景、测量范围等指标进行分类。
激光雷达数据处理
收集到的激光点云数据需要经过处理才能用于实际应用。数据处理一般包括以下步骤:
-
1. 数据预处理:包括滤波去噪、去除异常点等。
-
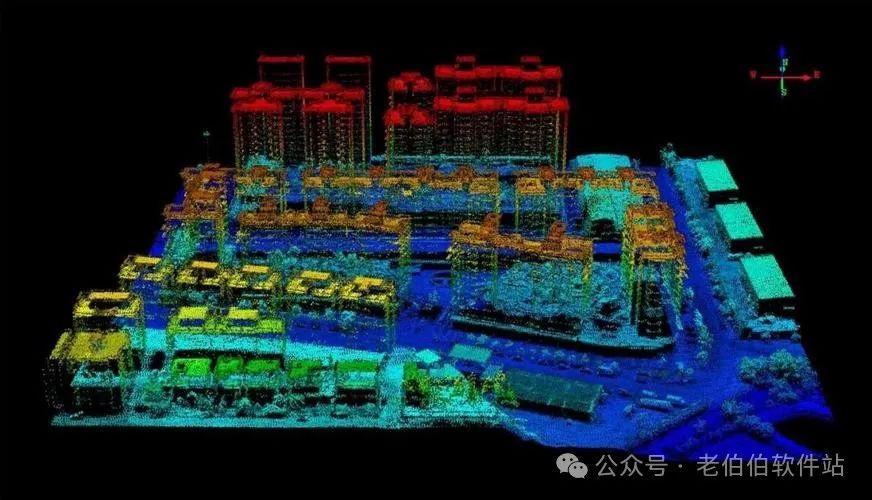
2. 点云配准:结合多个传感器数据,将点云拼接成完整的3D模型。
-
3. 物体检测与分类:通过算法识别并分类物体。
-
4. 环境建模:构建周围环境的三维地图。
自动驾驶中的激光雷达应用
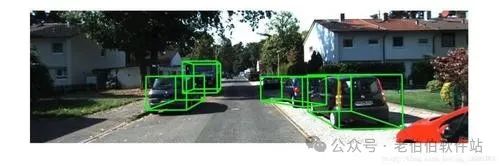
自动驾驶汽车是激光雷达最热门的应用场景之一。在自动驾驶中,激光雷达主要负责感知周围环境,具体可以用于:
-
1. 障碍物检测:识别和定位车辆周围的行人、自行车、其他车辆等。
-
2. 车辆定位:结合地图和其他传感器数据,进行精确的定位。
-
3. 道路特征识别:包括路面边缘、交通标志、车道线等。
-
4. SLAM(Simultaneous Localization and Mapping):即时构建周围环境地图并定位自身位置。
激光雷达在自动驾驶技术中的最大优势在于其高精度和良好的环境适应性。例如,即使在恶劣的天气条件下,激光雷达仍然可以提供准确的三维信息。
自动驾驶中的激光雷达架构
在自动驾驶汽车中,激光雷达与其他传感器(如摄像头、雷达和超声波传感器)联合工作,以获得更全面的环境感知能力。下面是一个简化的自动驾驶传感器架构图:
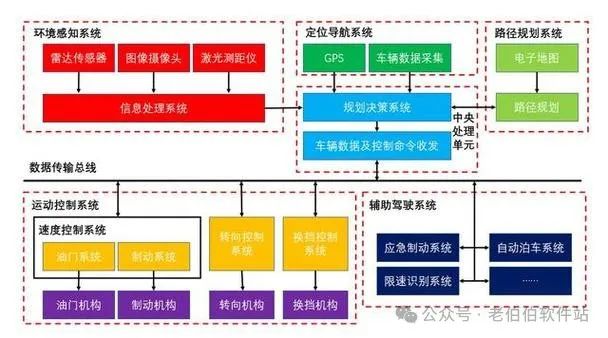
在实际的自动驾驶系统中,数据融合和处理模块非常关键,它需要处理大量来自不同传感器的信息,做出快速可靠的决策。
结论与展望
激光雷达是自动驾驶车辆实现高级辅助驾驶和全自动驾驶的关键技术之一。随着技术的发展,激光雷达正变得更加小型化、性能更高、成本更低,有望更广泛地应用于自动驾驶和其他领域。通过对激光雷达技术的深入理解,我们可以更好地把握未来的技术发展趋势。