PID控制算法综述自动控制领域中,PID控制算法是一种经典的控制算法。它是由比例、积分和微分三个部分组成的控制算法。在控制系统中,PID控制算法有着广泛的应用,具有收敛速度快、稳定性好、实现简单等优点。
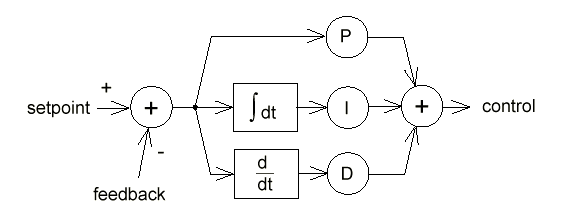
PID控制算法是一种基于反馈原理的控制算法。它根据被控物理量与设定值之间的差别,通过比例、积分和微分三个方面对被控物理量进行控制。PID控制算法的基本原理可以用下面的公式表示:
u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt
其中,u(t)表示控制变量;e(t)表示误差信号,即设定值与实际值之间的差别;Kp、Ki、Kd分别是比例、积分和微分部分的系数。
1)比例部分(Kp):简单地说,比例控制就是:控制变量与设定值之间的差别越大,则反馈信号的幅度越大,控制变量的变化就越大。比例系数越大,控制变量对误差的贡献就越大。
2)积分部分(Ki):积分控制就是对误差信号进行求和积分,把误差信号在一定时间内的影响都考虑进去。积分控制可以消除静态误差,从而使系统达到稳定状态。
3)微分部分(Kd):微分控制通过对误差信号的微分来调节控制变量的变化速度,使得控制变量更加顺畅。微分控制可以有效地消除系统的动态误差,提高系统的响应速度。
PID控制算法广泛应用于自动控制领域,并且在实际控制系统中有着广泛的应用,包括位置控制、速度控制、温度控制、流量控制等等。下面以几个典型的应用为例详细介绍。
PID控制算法在位置控制中有着广泛的应用。对于位置控制系统,通常是以一种线性方式来控制最终的目标位置。在这种情况下,PID控制算法需要通过位置传感器来检测当前的位置,然后通过比例、积分、微分三个部分调整电机的输出来实现目标位置的控制。
在机器人控制、车辆控制、飞机控制等应用中,PID控制算法可以通过速度传感器来检测当前的速度,并对电机输出进行控制,从而使系统保持到达目标速度的状态。在速度控制中,PID控制算法可以通过增加比例系数来提高系统响应速度,通过增加积分系数来消除静态误差,并通过增加微分系数来减少系统的震荡。

PID控制算法可以应用于温度控制系统,通过检测当前的温度和设定温度的差别,根据比例、积分和微分控制来调整环境的温度,从而保持系统稳定地工作。
在工业控制中,PID控制算法可以被用于流量控制。通过检测当前的流量和设定的流量之间的差别,根据比例、积分和微分控制来调整流量,从而达到流量的目标。
与其他控制算法相比,PID控制算法有着许多优点。下面列举其中的几条:
(1)实现简单:PID控制算法可以通过简单的计算机算法实现,可以在大多数现代控制器中找到。
(2)广泛应用:PID控制算法可以应用于很多不同的控制系统中,包括电机控制、温度控制、机器人控制等。
(3)具有良好的稳定性:PID控制算法可以通过改变KKI系数的值来实现系统的稳定性,因此具有良好的稳定性。
(4)容易优化:PID控制算法可以通过调整比例、积分和微分系数来优化系统的控制效果。
然而,与其他控制算法相比,PID控制算法也存在一些缺点。下面列举其中的几条:
(3)需要根据具体的应用场景调整参数,使得参数调整费时费力。
PID控制算法是一种经典的控制算法,具有广泛的应用和许多优点。它可以被用于电机控制、温度控制、机器人控制等很多不同的应用领域。然而,与其他控制算法相比,PID控制算法也存在一些缺点。在应用PID控制算法时,需要根据具体应用场景调整参数,并考虑到控制系统的稳定性和效率。